Tutoriel Frpv 3.1
1. Introduction
2. Sudoku du drone
-Principe
-Résumé
-Exemple marche avant
-Exemple Nooby
-Exemple Trippyspin
3. Comment Tourner
-Principe
-90° de pitch
-1er axe à entrainer
-Trouver l’équilibre
-Cycle Yawspin et Trippyspin
5. Les switchs
4. 90° de yaw
5. Batman + Sudoku
6. Matrik’s
7. Exercices
-Marche avant
-Marche arrière
-Marche Latérale
-P trippy And Trippy P
-Fondamentale et harmonique
-Mouvement en 8
-Zigzag
-Mouvement LIV
-DiagRollAndYaw
8. Modules
Prix : Partager a une personne 😀
1 : Introduction
Principe
Le pilotage d’un drone ressemble à la résolution d’un rubik’s cube :
Rassurez-vous, je ne vous demande pas d’apprendre à résoudre un rubik’s, c’est juste que l’histoire est un peu similaire avec le drone;
Exemple :
1. Repérez où vous en êtes.
2. Placez le rubik’s.
3. Exécutez un principe.
Le but est de s’entraîner à résoudre des problèmes logiques de manière instinctive.
En Fpv, on vous donne souvent un drone et on vous dit : “Essaie et tu verras bien.”
Cela peut être frustrant, comme si on vous donnait un rubik’s cube sans méthode de résolution.
C’est pourquoi il est important d’apprendre une méthode pour piloter un drone en Fpv.
Cela prendra un peu de temps au début, mais une fois que vous avez compris comment ça marche, tout deviendra logique.
De nombreuses personnes ont travaillé dur afin detrouver une méthode pour résoudre un rubik’s cube, et c’est la même chose pour le pilotage en Fpv.
Voici une image intéressante qui vous aidera à mieux comprendre:
Un fait intéressant est que les débutants peuvent parfois progresser très rapidement avec quelques conseils.
Par exemple, un débutant qui a passé 35 heures en simulation peut apprendre à effectuer un “batman” + “sudoku” en moins de 2 heures en comprenant ce qu’il fait.
Cela peut être frustrant pour ceux qui ont mis plus de temps à acquérir ces compétences. C’est important de réaliser que chacun progresse à son propre rythme et qu’il est possible de progresser rapidement avec les bonnes informations et un peu d’entraînement.
Il m’a fallu 2000 heures pour comprendre comment faire un “batman” + “sudoku” et être capable de l’expliquer à un débutant.
C’est très gratifiant pour moi de voir un débutant y arriver. Le plus frustrant c’est qu’ils ne réalisent pas forcément quel temps celà demande de le trouver par sois-même. Les gens pensent que ces choses existent depuis la nuit des temps.

2. Sudoku du drone
Principe
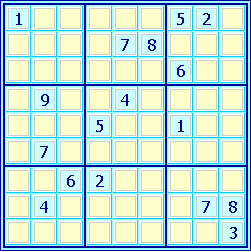
Le drone fpv est comme un sudoku:
Pour résoudre un Sudoku, vous devez utiliser une logique de 3 ou une procédure par élimination. Cela consiste à trouver les informations manquantes en utilisant celles qui sont connues. En pilotage de drone, vous devez également trouver les positions manquantes des sticks en utilisant celles qui sont connues. Cela peut être fait en bloquant la position d’un stick ou en le laissant au centre. La clé pour résoudre ce type de problème est de trouver l’équilibre entre les informations connues et celles qui manquent.
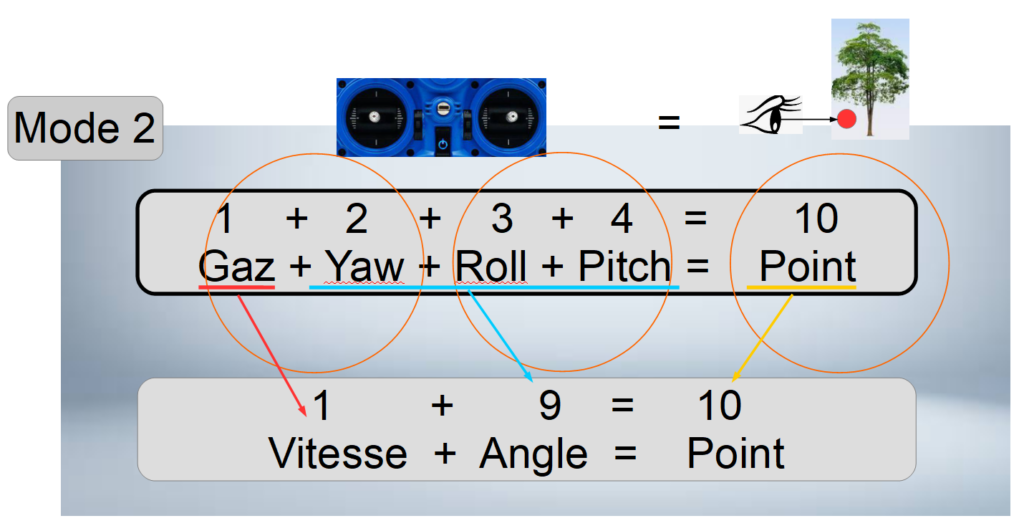
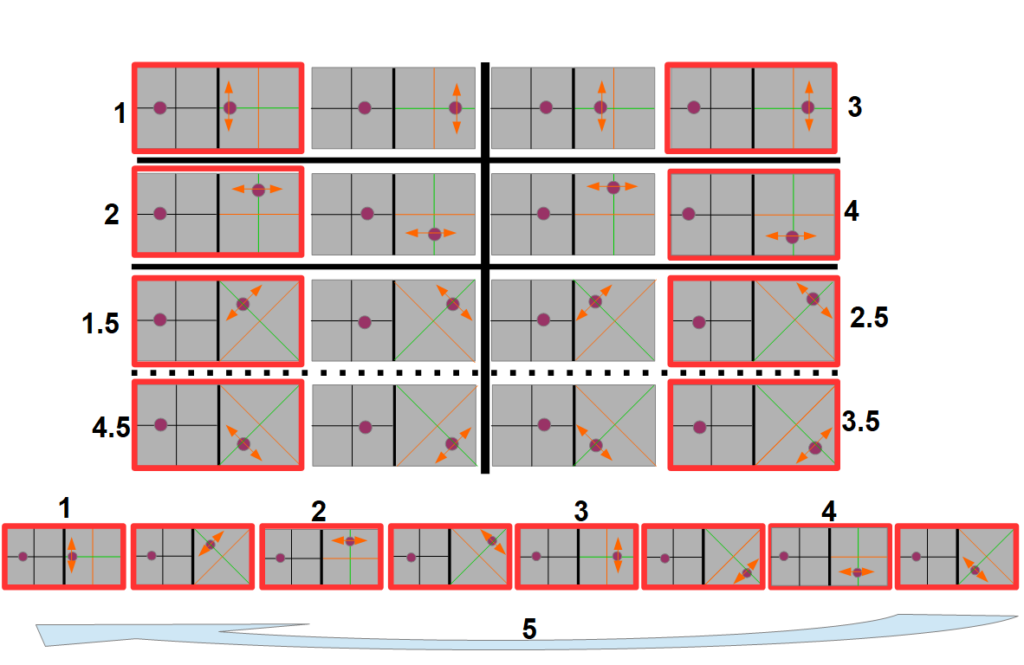
La radio commande Mode 2 :
- La main gauche (entourée en orange) : Elle contrôle les gaz et le yaw.
- La main droite (entourée en orange) : Le pitch et le roll.
- Vos yeux (entourés en orange) : ils vous permettent de regarder dans la direction que vous souhaitez suivre
Ceci est comme l’équation : A + B + C + D = E
Utilisez ce principe :
- Bloquez la main droite et jouez avec la main gauche
- Bloquez la main gauche et jouez avec la main droite
- Bloquez un ou plusieurs axes et cherchez avec les autres.
Il est possible de réduire l’équation :
- L’angle du drone (flèche bleue) : Yaw/Pitch/Roll
- La vitesse (flèche rouge) : Gaz
- La direction (flèche jaune) : Un point au loin à fixer
Pour trouver la direction idéale, vous devez trouver l’équilibre parfait entre l’angle du drone, la vitesse et la direction.
Cela peut être comparé à une équation : A + B = C.
Un angle du drone + une bonne vitesse = une bonne direction.
-Si vous bloquez la vitesse et que vous fixez un point, il vous reste l’angle à trouver.
-Si vous bloquez l’angle et le point, il vous reste la vitesse à trouver.
En utilisant cette logique, vous pourrez mieux comprendre comment contrôler votre drone et atteindre vos objectifs en Fpv.
La direction est un point à fixer au loin :
- Fixez un point au loin et faites le mouvement de stick correspondant.
- Vous tenez vos sticks avec vos mains et vous tenez le point avec vos yeux.
- Cette technique est utilisée dans de nombreux domaines, comme la conduite, le tir, les arts martiaux, etc.
- Le drone est fortement lié à ce point.
- Il est aussi réel qu’un stick et doit être pris en compte dans chaque mouvement.
- Certains mouvements de sticks créent des vries qui dessinent le point au milieu de l’écran. Vous pouvez le montrer aux autres personnes.
- Il devient une pointe de stylo propre à votre imaginaire.
Question :
Combien de points pouvez-vous imaginer dans une sphère qui vous entoure ?
Réponse :
Beaucoup, mais au moment du mouvement, vous n’en regardez qu’un seul.
Résumé
En résumé, pour utiliser la logique de 3 dans les sticks :
- Fixez un point au loin et utilisez les sticks pour atteindre cette direction.
- Utilisez les sticks pour changer de direction et fixez un point au loin pour vous orienter.
Il y a plusieurs manières de faire cela :
- Bloquez la main droite et utilisez la main gauche.
- Bloquez la main gauche et utilisez la main droite.
- Bloquez un ou plusieurs axes et utilisez les autres.
En utilisant la logique simplifiée:
- L’angle du drone + la vitesse = la direction ( point)
- Fixez le point et fixez l’angle : Reste la vitesse à trouver.
- Fixez le point et fixez la vitesse : Reste l’angle à trouver.
- Fixez l’angle et la vitesse : Reste le point à trouver
Exemple Marche avant
Voici comment utiliser la logique simplifiée pour contrôler votre drone :
A) Trouvez l’angle du drone. Pour avancer, inclinez le drone vers l’avant (pitch).
- À ce moment, le pitch est connu et vous n’avez plus besoin de toucher au roll ni au yaw, qui sont également connus.
B) Fixez un point au loin.
- À ce moment, l’angle du drone et le point sont connus.
C) Trouvez les gaz !
- Si vous utilisez trop de gaz, vous montez.
- Si vous utilisez trop peu de gaz, vous descendez.
- Si vous utilisez la bonne quantité de gaz, vous allez droit.
Lorsque vous utilisez la bonne quantité de gaz :
- Le yaw, les gaz, le pitch, le roll et le point sont connus.
- Vous avez résolu le “sudoku du drone” une fois.
- Vous entrez dans un mouvement en équilibre.
- Vous réalisez que cette logique de 3 n’est pas si difficile, à moins de devoir la répéter plusieurs fois par seconde.
Plus bas, vous trouverez des astuces pour augmenter vos points par seconde.
Exemple Nooby
Voici comment faire un “nooby” :
A) Mettez 55% de gaz et lâchez complètement la main gauche.
- À ce moment, les gaz et le yaw sont connus.
B) Vous devez trouver le point au loin.
C) Faites de nombreux mouvements de sticks avec votre main droite pour ressentir et comprendre.
Vous pouvez constater que :
- Vous ressentez une contrainte mais qui contribue à la fluidité de votre vol.
- Vous utilisez un principe de “blocage” de la main gauche.
- Vous pouvez faire des éjections grâce à votre propre inertie.
- Faire ce type d’éjection vous permet plus tard de comprendre quand mettre les gaz pour faire des éjections impressionnantes.
- En race, les gaz sont constants, le “nooby” vous oblige à trouver l’angle idéal.
- Vous pouvez faire des appels et des contres-appels.
- Le “nooby” n’est pas du tout une manœuvre de débutant, car il permet de ressentir de nombreux effets.
- Vous pouvez passer de l’avant à l’arrière et la latérale sans toucher au yaw.
Exemple TrippySPin
Pour réaliser un trippyspin en direction du ciel et très cabré :
- Dirigez-vous vers le poteau et laissez-le passer sur votre droite.
- Une fois le poteau derrière vous, donnez un mouvement de pitch arrière afin de fixer l’angle du drone et le point. Ne touchez pas encore au yaw ni au roll.
- Cherchez les gaz pour partir en marche arrière. La bonne quantité de gaz vous permettra de partir droit. Les gaz et l’angle du drone sont connus.
- Donnez le mouvement de trippyspin en utilisant le yaw et le roll sans toucher au pitch ni aux gaz.
Vous pouvez vous attendre :
Car le poteau passe par la droite, les deux sticks soient dirigés vers l’extérieur.
Car le drone est cabré, attendez vous et à ce qu’il y ait plus de roll que de yaw.
Pour lancer le mouvement de trippyspin :
- Donnez un mouvement de yaw avec la main gauche et bloquez-le pour trouver le roll.
- Ou, donnez un mouvement de roll avec la main droite et bloquez-le pour trouver le yaw.
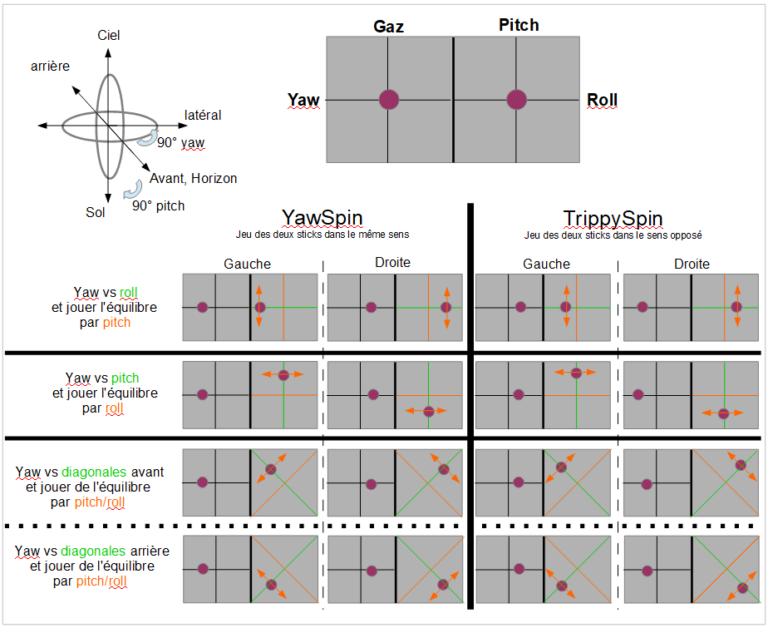
3. Comment Tourner
Principe
A) Pour réaliser le yawspin ou le trippyspin, il y a deux principaux mouvements à connaître :
- Le yawspin : Il s’agit d’un mouvement des deux sticks dans le même sens.
- Le trippyspin : Il s’agit d’un mouvement des deux sticks dans des sens opposés.
B) Pour réaliser ces mouvements, il est important de se poser la bonne question : si vous êtes en marche avant, Quelles sticks toucher pour donner le moins de mouvement de sticks possible ?
Pour répondre à cette question, il est nécessaire de vous repérer dans l’espace.
Reconnaitre la postition de votre drone:
-Suis-je cabré ou plat?
-Suis-je en marche avant, ou marche diagonale ou marche latérale ou marche arrière etc… ?
Pour ce que j’appel : 90° de pitch :
C)Dans une direction, entrainez-vous à faire des yawspin ou des trippyspin .
-A plat , entre deux, cabré.
-Par la gauche , par la droite.
Ce que celà change : le yaw devient roll et le roll devient yaw selon l’angle de pitch.
D )90°de yaw :
– Marche avant : Yaw vs Roll (sans pitch)
– Marche latérale : Yaw vs Pitch ( sans roll)
– Marche diagonale : Yaw vs Diag (sans pitch/roll)
La phrase à apprendre bêtement par coeur :
Dans une direction, à plat ou cabré, par la gauche ou par la droite; Entrainez-vous à faire des yawspin ou des trippyspin qu’avec le roll ou qu’avec le pitch ou qu’avec les diagonales.
Ne vous inquiétez pas, je vais développer tout celà plus bas ;D
1er axe à entrainer : Yaw vs Roll
Il est important de connaître l’angle de pitch du drone afin de savoir comment répartir la quantité de mouvements de yaw et de roll pour réaliser le mouvement souhaité.
Voici quelques indications à prendre en compte en fonction de l’angle de pitch :
- À 90° de pitch : le drone est très cabré. Vous êtes à l’extrême roll, évitez les mouvements de yaw. ( vous pouvez “forcer” avec un peu de yaw)
- Entre 46 et 89° de pitch : le drone est légèrement cabré :+ roll vs Yaw
- Entre 1 et 45° de pitch : le drone est légèrement à plat : + Yaw vs roll
- À 0° de pitch : le drone est à plat. vous êtes à l’extrême Yaw. Idem, vous pouvez tout de même forcer un peu de roll.
En résumé:
L’angle de pitch du drone doit être pris en compte pour répartir de manière optimale les mouvements de yaw et de roll ainsi trouver l’équilibre.
Il est également possible de chercher les extrêmes de yaw ou de roll sans passer par une certaine quantité
Pour monter ou descendre dans l’équilibre :
- 90° de pitch change la quantité de yaw vs roll . Une fois cette bonne quantité trouvée, vous êtes en équilibre.
- Si vous mettez trop de roll, vous allez descendre et devrez compenser avec du pitch arrière.
- Si vous mettez trop de yaw, vous allez monter et devrez compenser avec du pitch avant.
- Si vous utilisez la bonne quantité de yaw vs roll, vous resterez en équilibre et droit sur l’horizon.
Il est important de noter que vous pouvez monter ou descendre dans l’équilibre en forçant le yaw et le roll, ou en restant dans la bonne quantité et en jouant avec le pitch.
Trouver l’équilibre
Trouver l’équilibre du mouvement :
-Je dis yaw vs roll et sans pitch, mais pour monter, déscendre ou trouver l’équilibre, il est possible de jouer avec le pitch.
-Je dis yaw vs pitch et sans roll, mais pour trouver l’équilibre, il le roll est aussi là .
-Je dis yaw vs Diag et pour trouver l’équibibre, là c’est “roll/pitch”
Cycle Yawspin et Trippyspin
Cycle YawSpin : Yaw vs Roll et sans pitch
A) En direction du sol :
- Cabré: +roll vs yaw sans pitch
- Plat : +yaw vs roll sans pitch
B) Le sol devient l’horizon :
C) Le sol devient le ciel :
Constatez :
- Les deux sticks doivent être placés vers la gauche ou la droite car en fonction du yaw vs roll.
Remarque intéressante :
- Le yawspin yaw vs roll peut être réalisé dans 5 orientations différentes et dans une sphère.
- 2 orientations sont possibles en fonction de la direction (gauche ou droite).
- 3 orientations sont possibles en fonction de l’angle (plat ou cabré ou entre deux).
- La direction du sol, de l’horizon et du ciel représentent 3 points fixes et distincts dans cette sphère.
Cycle TrippySpin:
Pour réaliser ce mouvement, il est important de maintenir l’angle du drone, le point, et la bonne quantité de gaz.
A) Idem que pour le yawspin.
Constatez :
-Les deux sticks doivent être poussés vers l’intérieur ou extérieur en fonction de yaw vs roll.
Remarque intéressante :
Si Le trippyspin yaw vs roll peut être réalisé 5 fois dans une sphère.
Ensemble, le yawspin et le trippyspin yaw vs roll peuvent être réalisés 10 fois dans une sphère.
4. 90° de yaw
Ne change pas de direction
90° de yaw :
-Selon la marche,pour tourner, vous pouvez vous attendre à une certaine quantité de yaw VS “quel axe”;
-Utilisez seulement le yaw pour vous placer dans une marche différente..
0° de yaw :
Marche avant : Yaw vs Roll sans Pitch
45° de yaw :
Marche diagonale avant : Yaw vs Diag sans Pitch/Roll
90° de yaw :
Marche latérale : Yaw vs Pitch sans Roll
En résumé :
-90° de yaw fait que le Roll devient pitch et que le pitch devient roll.
-90° de yaw vous permet de chercher les extrêmes Pitch et Roll sans passer par les diagonales.
-En marche latérale, si vous ne touchez qu’au yaw, celà change le point de vue ( la marche) mais vous ne changez pas de direction.
Le Roll devient Pitch
A) Faites une belle marche avant.
B) Donnez un mouvement de yaw de 90° afin de vous placer en marche latérale.
C) Utilisez le yaw VS pitch pour réaliser des yawspin sans toucher au Roll.
Le Pitch devient Roll
A) Faites une belle marche avant.
B) Donnez 90° de yaw pour vous placer en marche latérale.
C) Utilisez un mouvement de Roll pour effectuer un powerloop ou un mattiflip en marche latérale.
Constatez :
-Le powerloop ou le mattiflip en marche latérale sont effectués par le mouvement de Roll.
Pour créer un horizon artificiel à l’aide de quelques mouvements de sticks :
A) Faites une marche avant.
B) Donnez 90° de yaw pour passer en marche latérale.
C) Utilisez le Roll pour trouver l’horizon tout en réduisant les gaz.
D) Donnez un mouvement de yaw de 90° pour revenir en marche avant.
E) Utilisez le Roll pour effectuer une micro-compensation afin de retrouver l’horizon.
F) Vous êtes maintenant à l’extrême yaw.
5. Les switchs
Vs Roll // VS DIag // vs PItch
A) Bloquez une main et cherchez avec l’autre.
B) Faites des yawspin ou des trippyspin en utilisant différentes combinaisons de sticks :
1) Yaw vs roll
2) Yaw vs diagonale
3) Yaw vs pitch
C) Constatez :
- Yawspin plat vers trippy plat ou cabré
- Yawspin plat vers forcer le yawspin en cabré
Vs Roll Horizontal
A) Faites une belle marche avant.
B) Effectuez un 180° Yawspin “plat” en utilisant le yaw “droite” et le roll “droite”
C) Pour forcer le yawspin “plat” vers “cabré”, Maintenez le yaw bloqué et forcez le roll a fond à droite. Cela devrait produire une poussée arrière.
D) Pour passer du yawspin au trippyspin, bloquez le roll “droite” et changez le yaw de côté, ce qui devrait produire une poussée avant et vous permettre de freiner et de repartir.
Constatez :
- La poussée arrière produite par le yawspin
- La poussée avant produite par le trippyspin
Bonus :
Pour passer du trippyspin au yawspin en approchant d’une façade, suivez ces étapes:
A) Arrivez face au mur avec un trippyspin
B) Effectuez un switch en utilisant la main gauche
C) Maîtrisez le freinage en utilisant le yawspin et arrivez très près du mur.
Vs pitch vertical
A) Lancez un power loop ou un mattiflip vertical :
- Exemple avec un mattiflip : donnez du yaw gauche et du pitch avant, cela va provoquer un yawspin qui pousse vers la gauche.
- Switchez en bloquant la main droite (roll) et en changeant le yaw de côté, ainsi vous allez partir en trippyspin avec du yaw droit et du pitch avant, ce qui pousse vers la droite.
Constatez :
- Je parle de powerloop ou de mattiflip, mais en réalité il s’agit toujours de yawspin ou de trippyspin, seulement cette fois ils sont effectués avec du yaw vs pitch et sans roll.
- La poussée vers la gauche ou la droite dépend de la direction du yaw.
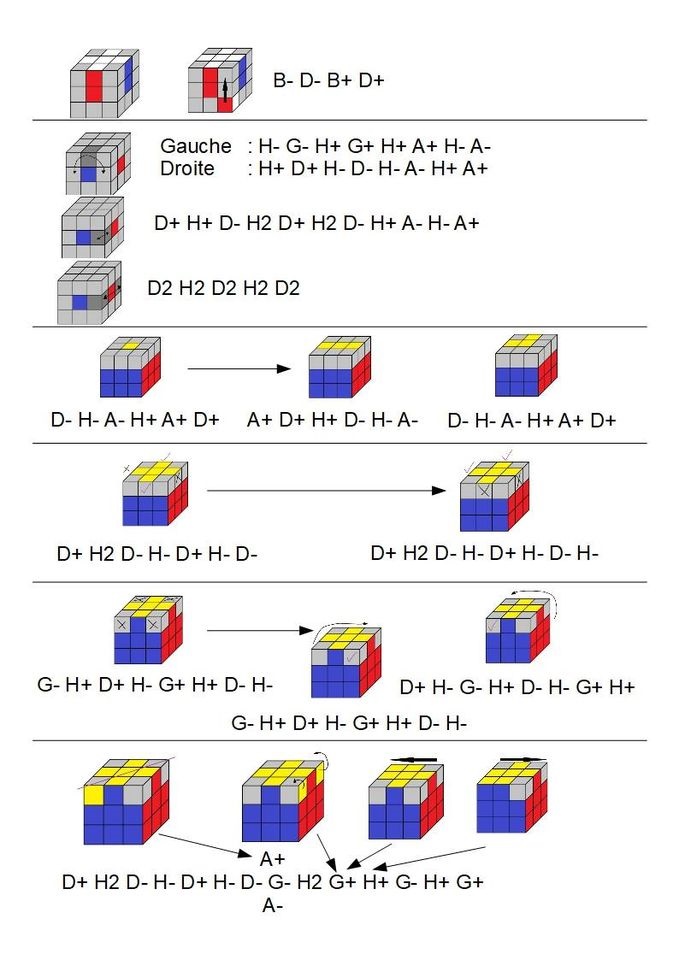
6. Batman + Sudoku
J’aime nommer cet trik’s : Le batman + sudoku.
Il est très important car il vous permet de débloquer de nouvelles perceptions en passant par tous les axes.
Il se fait dans quatre directions différentes, ce qui signifie que si vous savez en faire une, vous savez en faire les autres.
De même, si vous savez faire un switch, vous savez en faire dans les autres.
Le nom “batman” pour ce trik’s est utilisé pour aider à se souvenir de lui rapidement grâce à une image forte, tandis que le nom “sudoku” fait référence à la logique de trois similaire à celle du célèbre jeu de logique.
Comment faire un batman :
A) Lancez le 1er yawspin : yaw vs roll et sans pitch.
A ce moment :
-Vos sticks sont bloqués.
-Vous êtes en équilibre, depuis là tout se joue.
B) Maintenez la main gauche (gaz et yaw) bloquée et utilisez la main droite pour effectuer une rotation.
Exemple : Yaw gauche vs rotation droite
- Yawspin : Yaw vs roll gauche (sans pitch)
-Switch diagonale- - Yawspin : Yaw vs pitch avant (sans roll)
-Switch diagonale- - Trippyspin : Yaw vs roll droite (sans pitch)
-Switch diagonale- - Trippyspin : Yaw vs pitch arrière (sans roll)
-Switch diagonale- - Retour au 1er yawspin.
Autres sens :
-Yaw droite vs rotation droite
-Yaw gauche vs rotation gauche
-Yaw droite vs rotation gauche
Constatez :
-C’est un mouvement en équilibre allant aux limites du décrochage, il n’est pas nécessaire de forcer.
-Le fait de bloquer la main gauche permet de ne plus avoir à y penser et de se concentrer sur la main droite.
-Le yawspin yaw gauche vs pitch avant ressemble à un mattiflip horizontal.
-Le trippysin yaw gauche vs pitch arrière ressemble à un powerloop horizontal.
7. Matrik's
Matrik's Yawspin
Augmentez vos points par seconde:
-Rappelez-vous l’exemple de la marche avant; Cela consiste à résoudre le sudoku 1x. -L’angle du drone + la vitesse = un point
Comprendre :
- Si je fixe l’angle du drone en ne touchant plus au yaw, pitch et roll
- Si je fixe un point
- Il me reste une bonne quantité de gaz à trouver.
Effet :
- Cela arrête le drone
- Cela prend une photo du point que vous fixez
Procédure :
A) Faites une belle marche avant
B) Réduisez légèrement les gaz
C) Changez l’angle en donnant un mouvement de yawspin : yaw vs roll sans pitch.
D) Fixez l’angle en ramenant les sticks au centre
E) Remettez la bonne quantitée de gaz
Remarque :
- Pour augmenter vos points par seconde, il faut trouver le bon équilibre entre l’angle du drone et la vitesse, en fonction de la manœuvre que vous voulez effectuer.
Matrik's Try Hard
Effet supplémentaire :
-Le mouvement peut être difficile à maîtriser et peut causer de la fatigue au bras et à la tête.
-Il peut donner un effet robotique au vol du drone.
-Ce mouvement ne se pratique pas IRL, juste en simulateur afin de tryhard et aquérire le mouvement.
Procédure :
A) Donnez des mouvements de gaz en rythme, par exemple 1x par seconde.
B) Modifiez l’angle en touchant les sticks souhaités.
C) Fixez l’angle en ramenant les sticks au centre.
D) Fixez le point.
E) Remettez les gaz.
Matrik's dans trik's
Pour réaliser des matrik’s dans les trik’s, voici une procédure à suivre :
A) Faites un trik’s ou des éjets selon votre préférence.
B) Fixez l’angle en remettant les sticks au centre.
C) Trouvez la bonne quantité de gaz pour stopper le drone.
Effet :
- Création d’une photo stylée du point que vous fixez grâce à votre maîtrise du drone et de vos mouvements.
- Ajout de style et de finesse à votre vol.
8. Exercices
Marche avant
A) Pour une marche avant rapide :
-Donnez des gaz à fort et inclinez le drone vers l’avant en utilisant le pitch.
-Utilisez le yaw pour maintenir l’orientation horizontale du drone et le roll pour maintenir l’équilibre.
-Rapidement, ça sera : + Roll vs Yaw
B) Pour une marche avant lente :
-Réduisez les gaz et inclinez le drone moins vers l’avant en utilisant le pitch.
-Utilisez le yaw pour maintenir l’orientation horizontale du drone et le roll pour maintenir l’équilibre.
-Lentement, ça sera : + Yaw vs Roll
En résumé:
-Il est important de maintenir l’équilibre du drone en utilisant le yaw et le roll tout en changeant la vitesse et l’inclinaison du drone en utilisant les gaz et le pitch.
-En regardant loin vers l’avant, vous pouvez mieux anticiper les virages et rester en contrôle du mouvement du drone.
Marche arrière
La marche arrière est une compétence importante à maîtriser pour devenir un pilote de drone expérimenté. Il est important de s’entraîner à la marche arrière à la fois rapide et lente afin de développer votre capacité à contrôler le drone dans différentes situations.
Pour tourner en marche arrière, il est important de comprendre comment fonctionne le yaw et le roll.
Exemple A :
-En marche avant, pour monter, il faut tirer le stick de pitch vers l’arrière.
-En marche arrière, pour monter, il faut pousser le stick de pitch vers l’avant.
Exemple B :
-En marche avant,on utilise un yawspin pour tourner et un trippyspin pour redresser.
-En marche arrière, c’est l’inverse : on utilise un trippyspin pour tourner et un yawspin pour redresser.
(même si ça marche dans tout les sens, je dirais c’est une tendance)
Exemple C :
-En marche avant, si vous utilisez un yawspin pour tourner vers la gauche ( vos deux sticks vers la gauche) , vous allez vous diriger vers le bord gauche.
-En marche arrière, c’est l’inverse : pour vous diriger vers le bord gauche, il faudra utiliser ce yawspin mais avec les deux sticks vers la droite.
Pour résumé, voici les étapes à suivre pour maîtriser la marche arrière :
- Lancez une marche avant et fixez les gaz et le pitch.
- Effectuez un mouvement de 180° de yaw pour passer en marche arrière.
- Utilisez le yaw et le roll pour tourner et restez en équilibre.
Marche Latérale
EN construction
EN construction
P trippy And Trippy P
Ce mouvement est intéressant pour :
– Entrer dans un dive.
– Faire demi-tour
– Pour comprendre un principe de notation de trik’s.
Pour effectuer un Trippy P- :
- Commencez par une belle ligne droite en direction du dive.
- Fixez un point au loin sur l’horizon.
- Faites un mouvement de 180° de trippy et arrêtez le mouvement.
- Donnez du pitch arrière pour voir le sol
- Fixez le point au sol et faite votre dive.
- Remaquez une fois que vous voyez le point au bas du dive, vous pouvez alors faire des mouvement de trippy pour tenir le point.
Pour effectuer un P+ Trippy :
- Commencez par une belle ligne droite en direction du dive.
- Donnez 90° de pitch avant afin de voir le sol.
- Fixez un point au loin sur le sol.
- Faites un mouvement de 180° de trippy et arrêtez le mouvement.
- idem, une fois le mouvement arrêté, vous pouvez vous rattraper par des mouvements de trippy.
Remarque :
Gardez à l’esprit que ces mouvements peuvent également être effectués avec un yawspin. Il est important de s’entraîner avec les différentes façons.
Fondamentale et harmonique
Marche avant et Loop
L’idée est de comprendre qu’il est possible de superposer des mouvements.
Voici une sinusoïde fondamentale :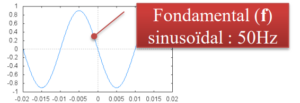
Une sinusoïde harmonique :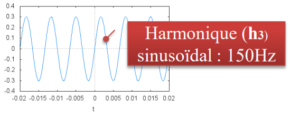
Une superposition : sinusoïde fondamentale harmonique :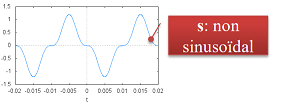
Procédure :
A) Faites une marche avant : Cette ligne droite est la fondamentale.
1)Dans cette ligne droite, vous pouvez tourner avec des yawspin ou trippyspin, ce sont les harmoniques.
B) Faites un powerloop ou un mattiflip : La ligne droite est bouclée, c’est la fondamentale.
1)Dans la boucle, tournez avec des yawspin ou trippyspin, ce sont les harmoniques.
Trippy Loop
Procédure inverse :
A)Lancez un trippyspin en direction de l’horizon->Fondamentale
1)Avec le pitch arrière pour un powerloop >Harmonique
ou
-Avec le pitch avant pour un mattiflip>Harmonique
En résumé:
Voyez, cette histoire de fondamentale et harmonique, c’est juste car j’aime beaucoup parler de ça…
C’est une compilation des mouvements.
Mouvement en 8
Zigzag
Pour réaliser un mouvement en zigzag, vous devez reproduire les mêmes mouvements que pour un mouvement en 8, mais en ajoutant des poteaux à passer entre chaque boucle.
Mouvement LIV
Mouvement LIV :
-Demi tour
-Rewin
-Appel contre appel
Le mouvement V :
-la croix
La croix est intéressante:
-Souvenez-vous : 90° de yaw mène de marche avant vers marche latérale.
-La croix est d’une marche avant vers une marche latérale avec la tête en bas en plus.
Effet :
1) De l’horizon avant
2) Vers l’horizon latéral et tête en bas.
3) Vers l’horizon arrière
4) vers l’horizon latéral et tête en bas.
5)Retour vers l’horizon avant.
-C’est un peu comme le batman mais avec les diagonales.
-Mène vers DiagRollAndYaw
DiagRollAndYaw
DiagRollAndYaw :
A) Faites votre plus belle ligne droite.
B) Donnez une diagonale (roll et pitch) , ainsi vous trouver sur l’horizon latéral et avec la tête en bas.
C) Redressez avec le Roll pour revenir la tête droite.
D)Retournez en marche avant avec le yaw.
YawRollAndDiag:
A) Faites votre plus belle ligne droite.
B) Donnez 90° de yaw afin de vous placer en marche latérale.
C) Redressez 90° avec le Roll afin d’avoir la tête en bas et rester en marche latérale.
D)Retournez en marche avant avec une diagonale (roll et pitch).
9. Modules
MOdule Spiderman
Pour entrainer :
-Les appel-contre appel.
-Rewins
-Yaw vs pitch
-Yaw vs roll
-Yaw vs diag
-Dives
Module Matrik's
Pour entrainer :
-Des Matrik’s
-Orbites
-Orientation
Module Sphère Ext
Pour entrainer :
-Les orbites
-Yaw vs Pitch
-Yaw vs Roll
-Yaw Vs Diag
-Dives
-Powerloop / mattiflip.
Module Chuck Norris
Pour entrainer :
-Sa dextérité
-Quand Chuck Norris s’entraîne, c’est l’entraînement qui a peur de lui.
Module Indomptable
Pour entrainer :
-Monter ou descendre dans un tunel avec des obstacles par des mouvement de yawspin ou trippyspin.
Module Trippy Temporal
A) Pour entraîner un point en mouvement :
- Utilisez des yawspin (poussée arrière) ou trippyspin (poussée avant)
- Utilisez seulement le roll (sans poussée).
- Visez le présent de la trajectoire
- Visez le futur de la trajectoire
- Visez le passé
B) La question finale :
- Souvenez-vous de cette histoire de 10x dans une sphère pour un yawspin et trippyspin face au roll ?
Il est possible de reproduire par le pitch : 10x
et encore par les Diagonales : 20x
Au total : 40x dans une sphère.
C) Le problème :
Il existe encore un point en mouvement avec son présent, passé et futur.
Si le point fixé est en fonction d’un objet en mouvement:
-Pour le futur ; Vous regardez un point fixe avec un objet qui arrive;
-Le présent est un point en total mouvement;
-Le passé, un point fixe avec un objet qui s’éloigne .
ça ferait alors :
40x sur le point fixe du passé.
40x sur le point en mouvement pour le présent
40x sur le point fixe du futur.
40x sur un point totalement fixe pour l’intemporel.
Je ne sais plus trop.. 160x ?
Ou plutôt 40x pour le point fixe .. et 40x pour le point en mouvement…donc 80x …
Ou simplement 40x car en définitive …ça reste un point 😀 ….
et vous qu’en pensez-vous ?